交互式人机界面(iHMI)使人类能够控制硬件和收集反馈信息,是人与机器之间的桥梁,近几年引起了广泛的关注和迅速的发展。在iHMI中,柔性压力传感器和弯曲角度传感器被认为是机器人和手势识别等应用中最重要的部件。当这些传感器集成到iHMI中,模拟人类皮肤的综合特性时,它们需要被一致地覆盖在人体上,甚至需要集成类皮肤电池或自持续电源。然而,传统的基于压电PZT和AlN的压力传感器由于制造温度高、固有的脆性难以实现弯曲测量,与柔性衬底不兼容。聚合物基压电传感器,如聚偏氟乙烯(PVDF)具有良好的灵活性,但它们具有低灵敏度,以及压电性能差。目前关于弯曲检测的报道多为定性测量,仅判断是否存在弯曲,但对弯曲角度的定量检测较少。因此,在iHMI中实现具有自驱动能力的弯曲角度的定量测量仍然是一个很大的挑战。
近日,best365英国体育在线杨维清教授团队的青年教师邓维礼和研究生杨涛,利用静电纺丝技术构建了一种基于独特豇豆结构CPZNs的柔性自供电压电传感器(PES),定量测量了其弯曲角度,并成功演示了PES在iHMI手势远程控制中的应用。由于混合PVDF/ZnO的协同压电效应和聚合物的柔韧性,该PES表现出优异的弯曲灵敏度(4.4mV deg-1),角度范围从44°到122°,快速响应时间为76ms,并且具有良好的机械稳定性。此外,PES可在弯曲和按压模式下工作,显示0.33 V kPa-1的超高压力灵敏度,响应时间为16 ms。当集成在iHMI中时,PES可以在不同的曲面上适应性地覆盖,展示精确的弯曲角度记录和快速识别,以实现智能化人机交互。在此基础上,通过与人手同步动作的方式成功实现了机器人手的远程控制应用。这种基于CPZNs的自供电PES在结构和基本机制上是独特的,并且在iHMI中具有巨大的潜在应用。相关研究成果以“Cowpea-structured PVDF/ZnO Nanofibers Based Flexible Self-powered Piezoelectric Bending Motion Sensor Towards Remote Control of Gestures”发表于Nano Energy期刊上,邓维礼和杨涛为共同一作。
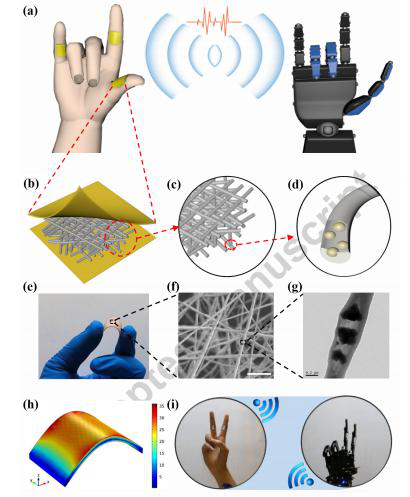
图1. 基于CPZN的自供电PES的结构设计。(a) 应用于iHMI领域的开发智能传感器示意图。(b) 装置,(c) NFs薄膜和(d) 单跟NF的示意图。(e) 弯曲模式下传感器的照片。(f)NF的SEM图像。(g) 单跟NF的TEM图像。(h) FEM模拟的结果。(i) 基于PES的机器人手遥控器的应用。
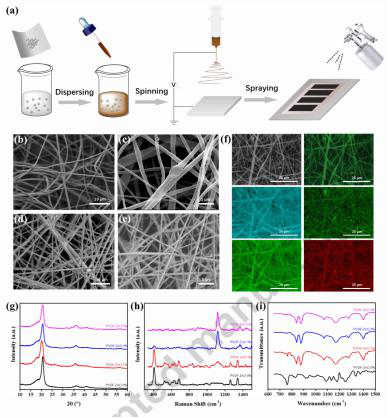
图2. PES的CPZN的表征。(a) PVDF/ZnO柔性传感器制造过程。PVDF/ZnO中 ZnO含量为(b)0wt%,(c) 1wt%,(d) 3wt%,(e) PVDF/ZnO 5wt%的SEM图像。(f) PVDF/ZnO NFs的元素分布图。(g) PVDF/ZnO NF的XRD图。(h) PVDF/ZnO NFs的拉曼光谱。(i) PVDF/ZnO NF的FTIR光谱。

图3. 设计的PES的电气特性。(a) 压力模型下PES的测量示意图。0.35 N ~ 8.75 N不同力下PES的开路电压(b)和短路电流(c)的关系。(d) 不同作用力下一周期开路电压的放大图。(e) 压力模型中PES的升降次数。(f) 压力为4.67 kPa的重复加压/减压条件下的PES在5000次循环下的力学耐久性试验。(g) 显示弯曲模型下PES测量的示意图。不同的角度(φ)范围从122°到44°,PES的开路电压(h) 和短路电流 (i) 关系。(j) 不同角度下增加开路电压。(k) 弯曲模型中的PES的上升/下降时间。(l) 角度为97°持续5000次循环重复弯曲/不弯曲条件下,PES的机械耐久性试验。

图4. 设计的PES在iHMI中的应用。(a) 检测PES握把力量的照片。(b) 不同握把强度下PES的短路电流输出。(c) 放置在书中的PES检测开/合书角度的照片。(d) PES在关闭阶段(红色区域)和开启阶段的短路电流输出(蓝色区域)。(e) 一种人机遥控系统示意图,采用几个简单的电气模块实现手势远程控制。(F) 基于PES的手势远程控制的应用。
综上所述,研究者通过电纺丝的方法成功地制备了豇豆结构的PVDF/ZnO纳米纤维,并展示了其作为柔性自供电压电传感器用于压力传感和弯曲运动监测的应用。所制备的PES既可以在压力又可以在弯曲条件下不需要外部电源的情况下工作,并具有良好的柔韧性和高灵敏度。通过无线传输脉冲信号从人类手指到机器人手掌,进一步成功实现自供电的实时手势远程控制系统。更重要的是,PES的优异性能使其很容易地集成到测量系统中,为iHMI的物理信号监测、手势传感等应用提供了巨大的潜力。
论文链接:https://doi.org/10.1016/j.nanoen.2018.10.049